# X-UAV Mini Talon airframe example
It is based on on Cyphal/DroneCAN Quadcopter KIT + airspeed sensor.
Let's consider nodes X-UAV Mini Talon airframe configuration example.

# 1. Prerequisites
It has the following RaccoonLab devices:
| № | View | Device |
|---|---|---|
| 1 | 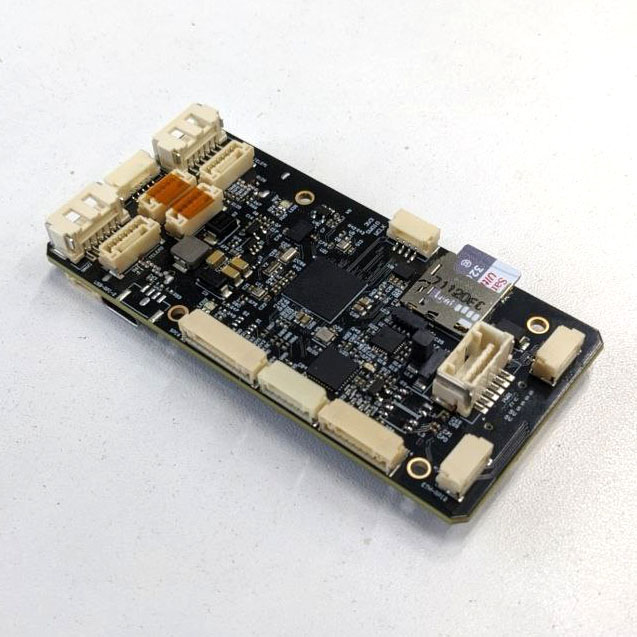 | RL Autopilot v6x |
| 2 | 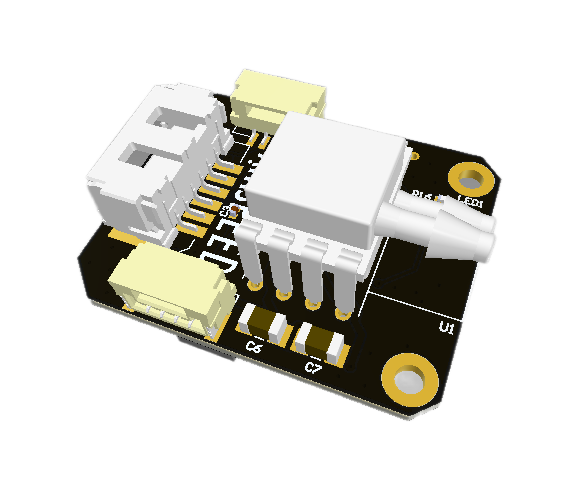 | co.rl.airspeed v2.3.2 |
| 3 |  | co.rl.gnss v2.5.0 NEO-M8N |
| 4 | 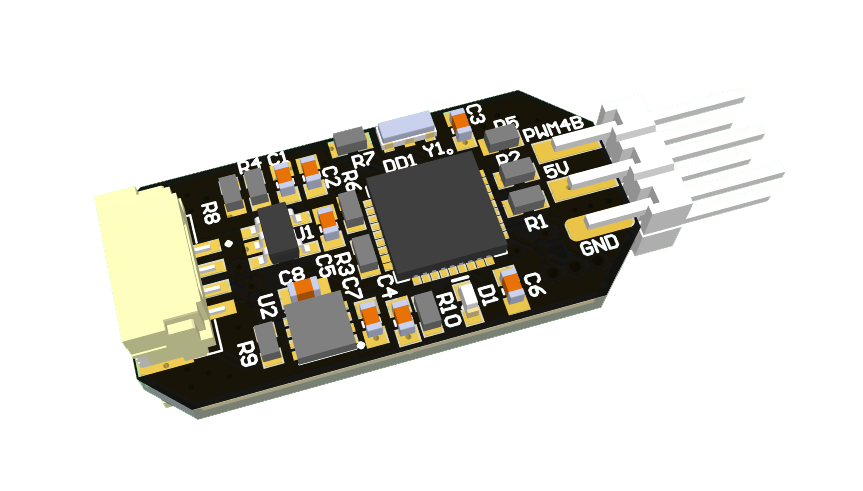 | co.rl.micro v1.2.2 x3 - Thrust ESC control - Right part control (aileone and rudder/elevator) - Left part control (ailerone and rudder/elevator) |
Here is a list of all the things you will need.
| N | Name Link | Description |
|---|---|---|
| 1 | ESC regulator |
# 3. Layout

| Top View Cap is opened | Nose view (pitot tube) | Electronics section view |
|---|---|---|
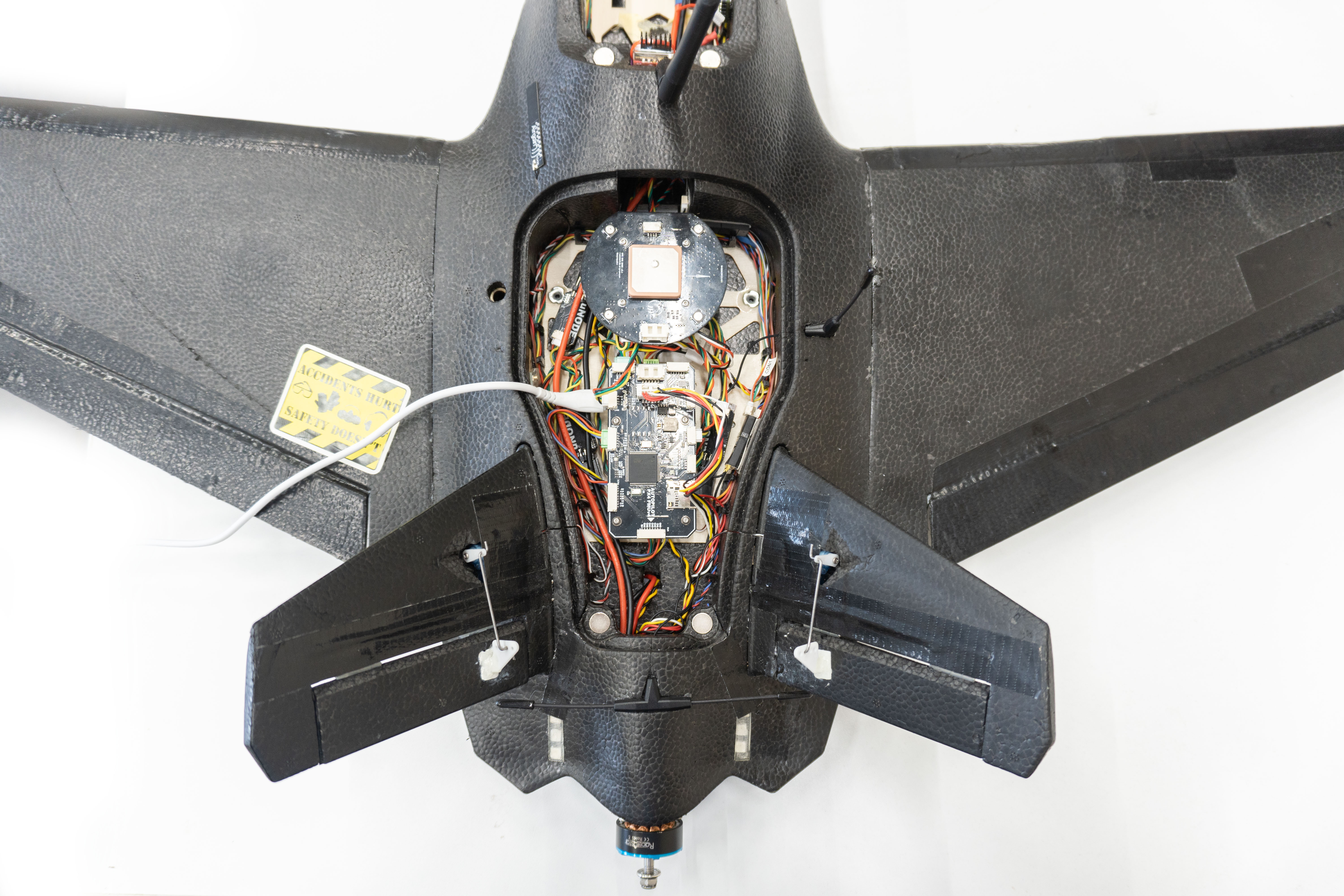 | 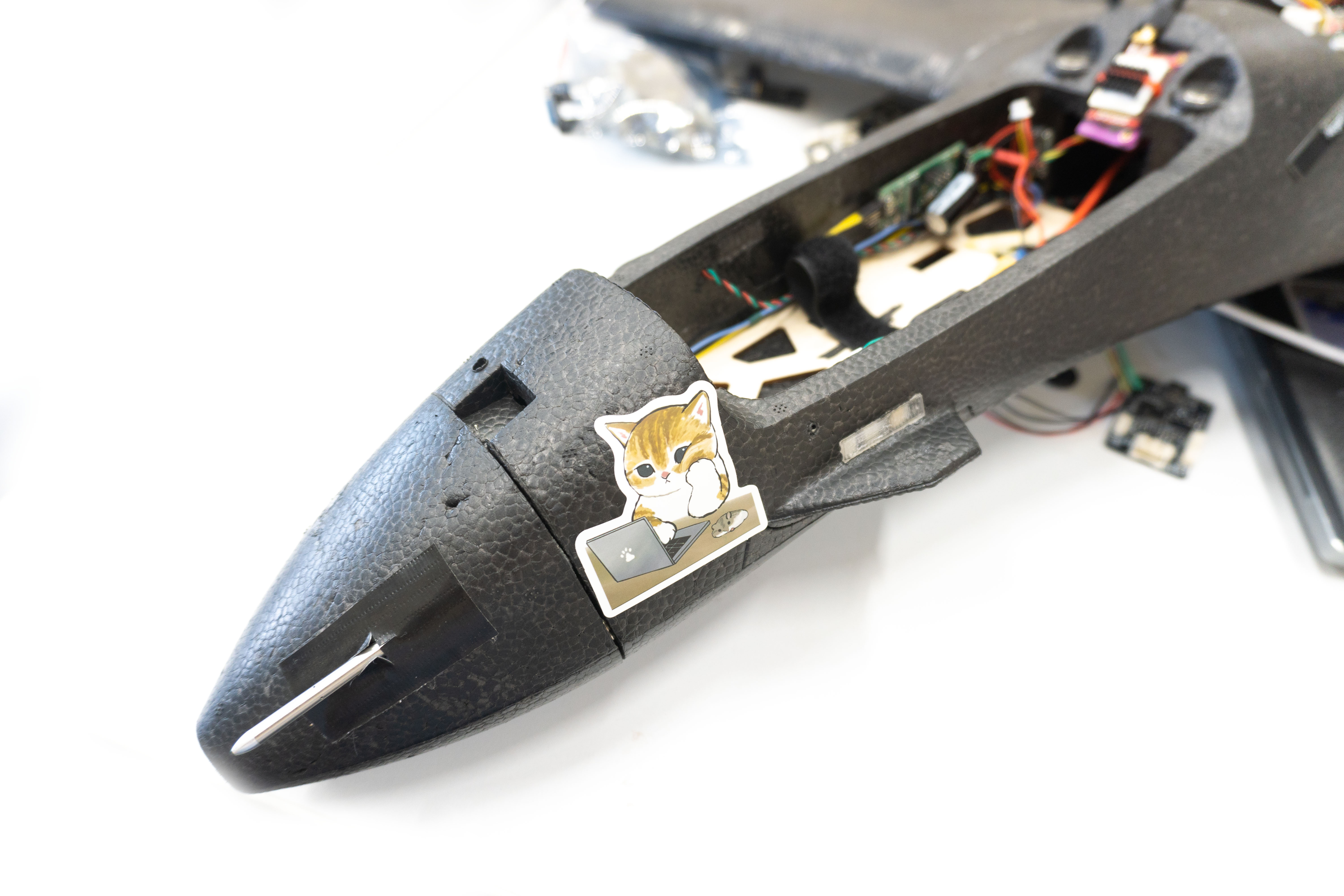 | 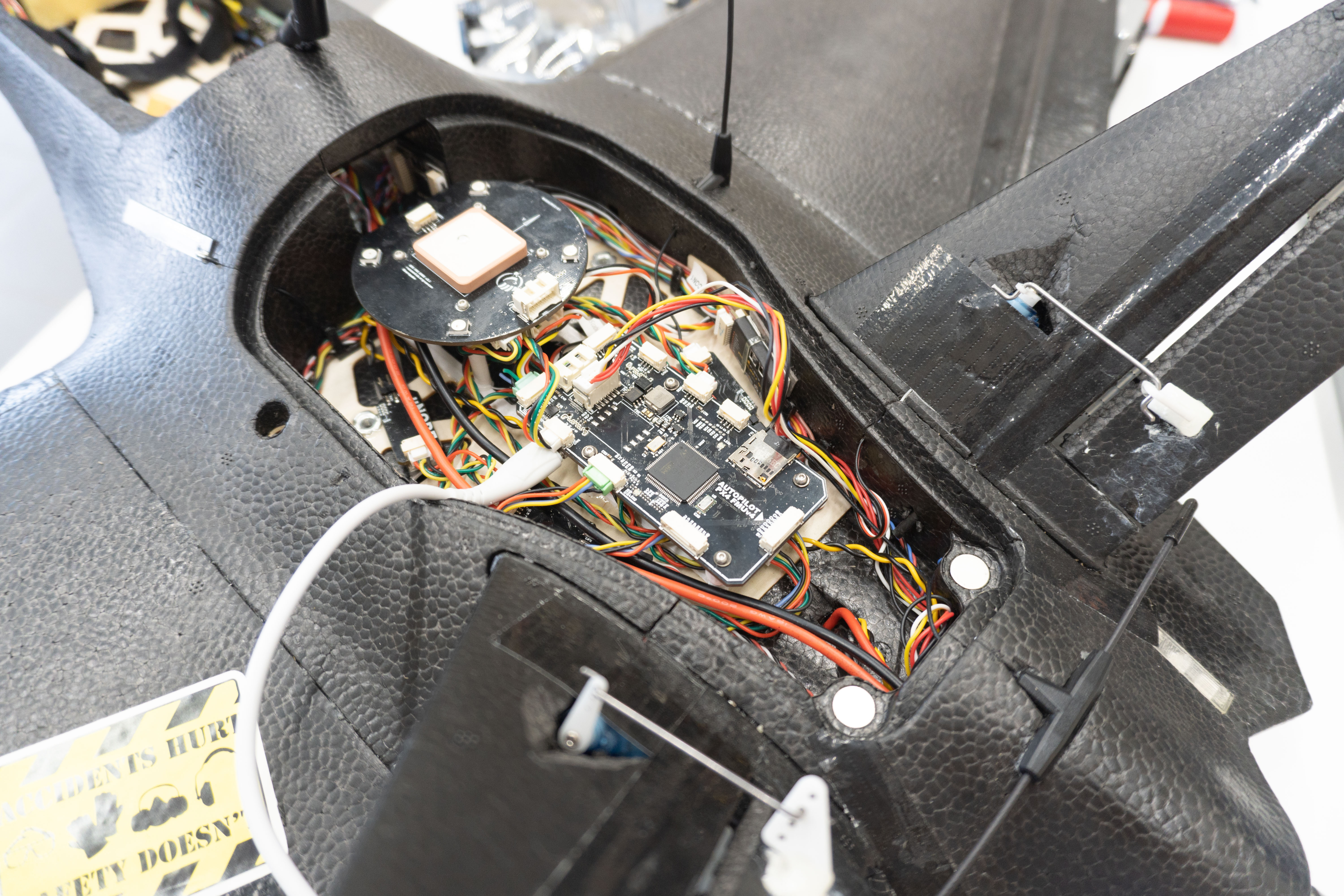 |
# 4. Autopilot configuration
Step 1. Load firmware and reset settings
Load the latest stable firmware and reset all settings to default.
Step 2. Select the airframe
It should be X-UAV Mini Talon (opens new window) airframe with SYS_AUTOSTART = 2200. Select the airframe as on the picture below:

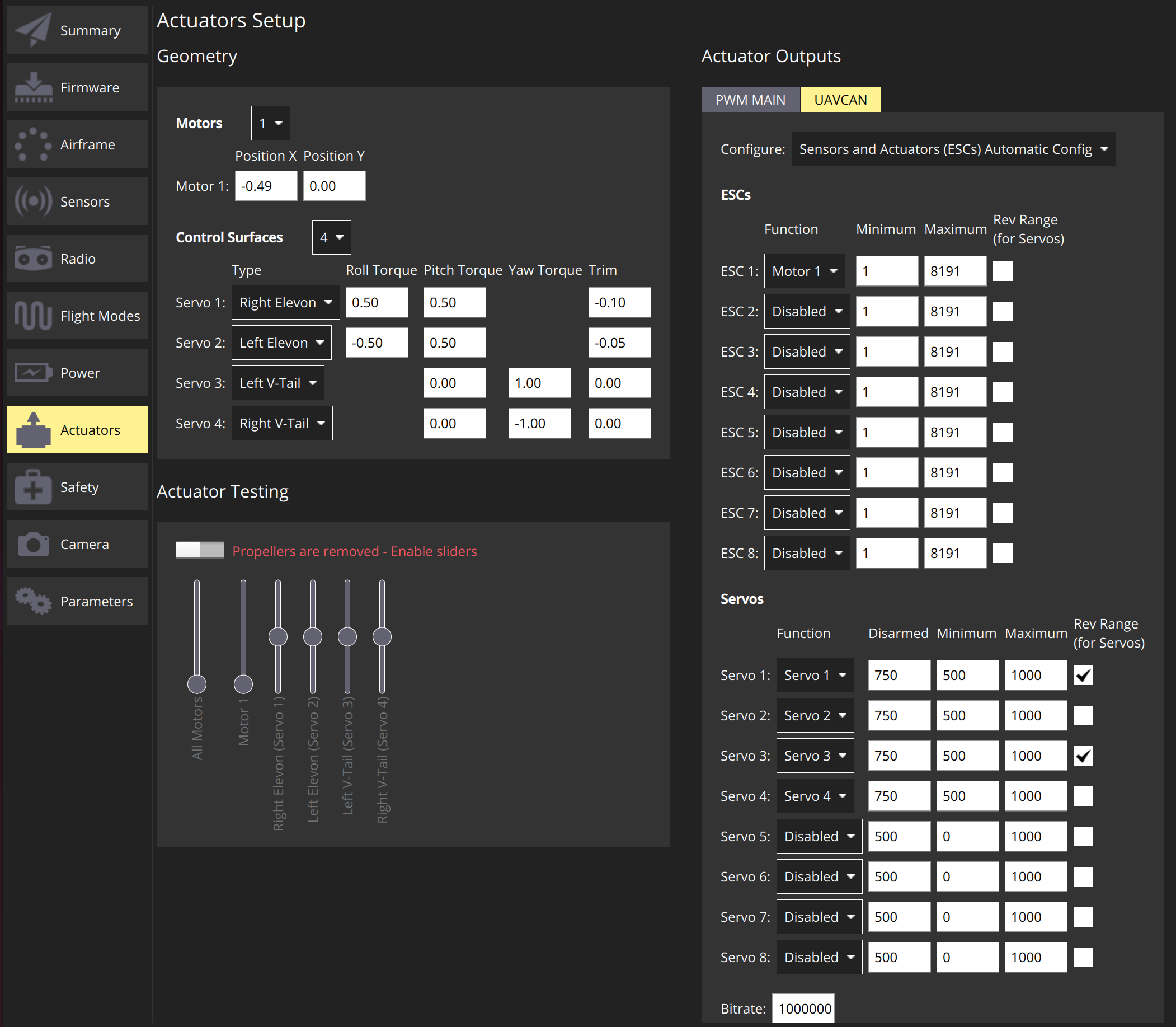
Step 3. Configure Actuators
Step 4. MAVLink Console
Check differential pressure sensor:
nsh> listener differential_pressure
TOPIC: differential_pressure
differential_pressure
timestamp: 442757386 (0.001325 seconds ago)
timestamp_sample: 442757385 (1 us before timestamp)
device_id: 8605443 (Type: 0x83, UAVCAN:0 (0x4F))
differential_pressure_pa: -2.20767
temperature: -246.64999
error_count: 0
nsh>
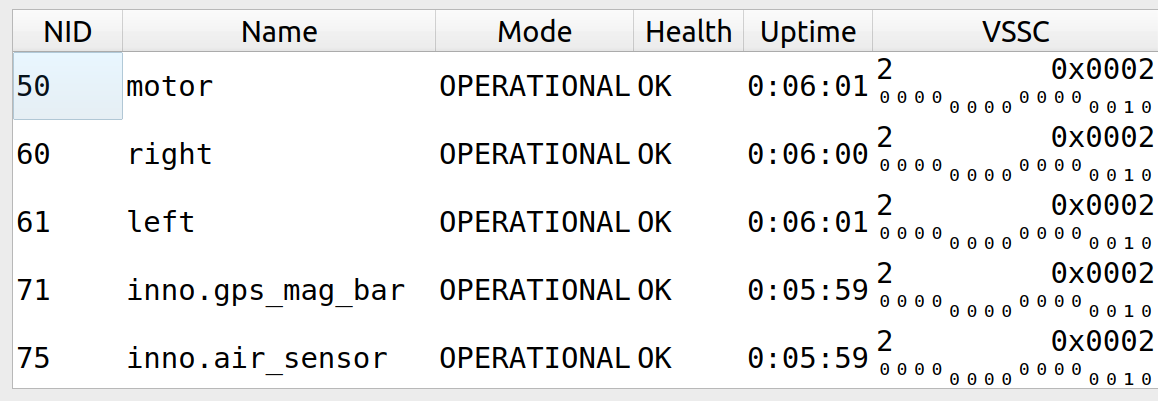
# 5. Nodes configuration