# Tracked Robot Frame Example
This example is based on a Cyphal/DroneCAN devices.
# 1. Prerequisites
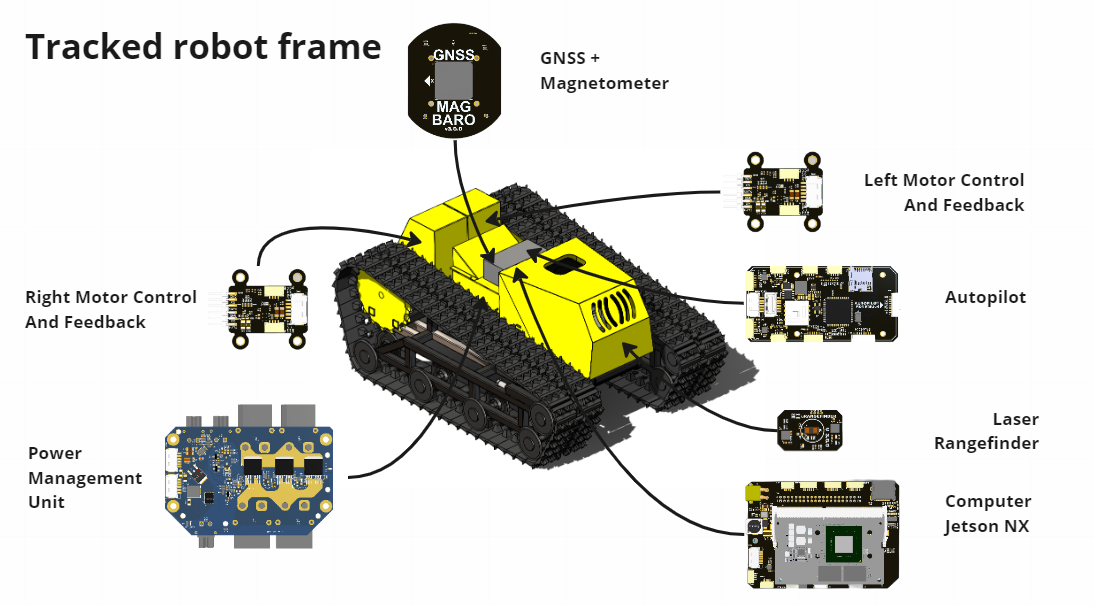
It has the following RaccoonLab devices:
| Devices used | Purpose |
|---|---|
| GNSS MAG BARO | GNSS, compass and barometer |
| mini v2 x2 | - Right Motor - Left Motor |
| Laser Rangefinder | |
| Power Management Unit | |
| Jetson NX baseboard | Main computer board |
| Autopilot | Main onboard controller |
Here is a list of all the things you will need.
| N | Name Link | Description |
|---|---|---|
| 1 |
# 2. Connection diagram
