# eVTOL airframe example
This example is based on a Cyphal/DroneCAN VTOL KIT + some additional devices.
# 1. Prerequisites
It has the following RaccoonLab devices:
| Devices used | Purpose |
|---|---|
| Airspeed x2 | Airspeed sensor, required for all wing types of UAVs |
| GNSS MAG BARO | GNSS, compass and barometer |
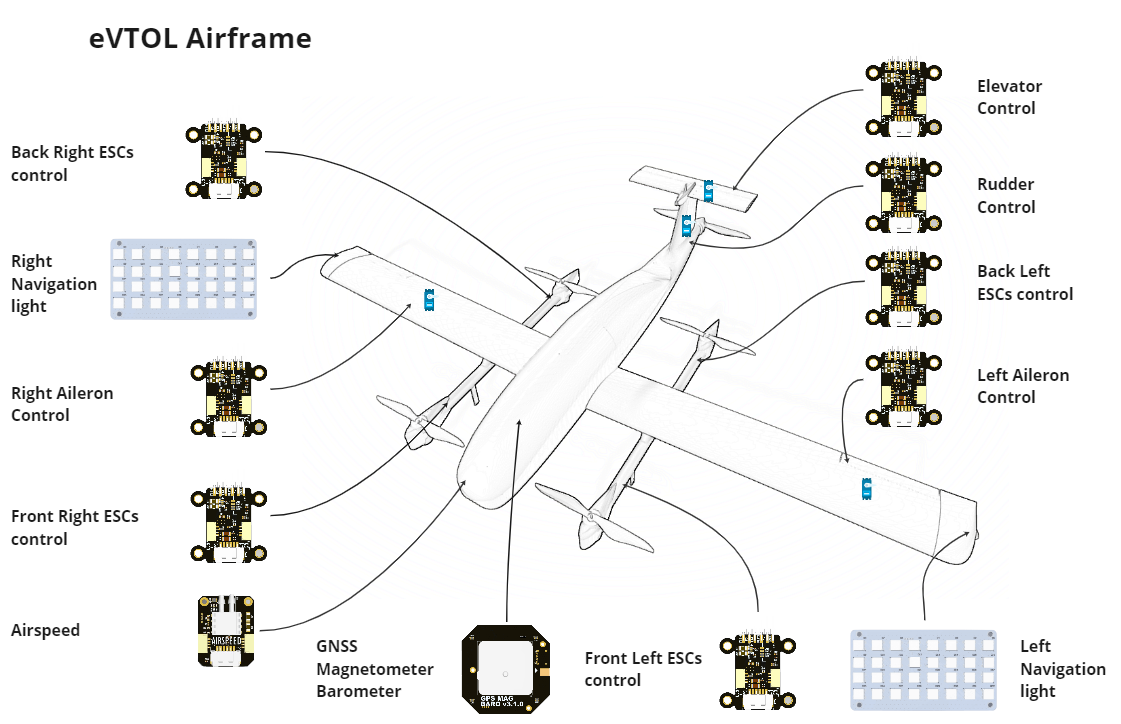
| mini v2 x8 | - Right front ESCs - Left rear ESCs - Left front ESCs - Right rear ESCs - Right aileron - Left aileron - Elevators - Rudders |
| Aircraft lights x2 | RGB LEDS |
| Autopilot | Main onboard flight computer |
Here is a list of all the things you will need.
| N | Name Link | Description |
|---|---|---|
| 1 | ESC regulator |
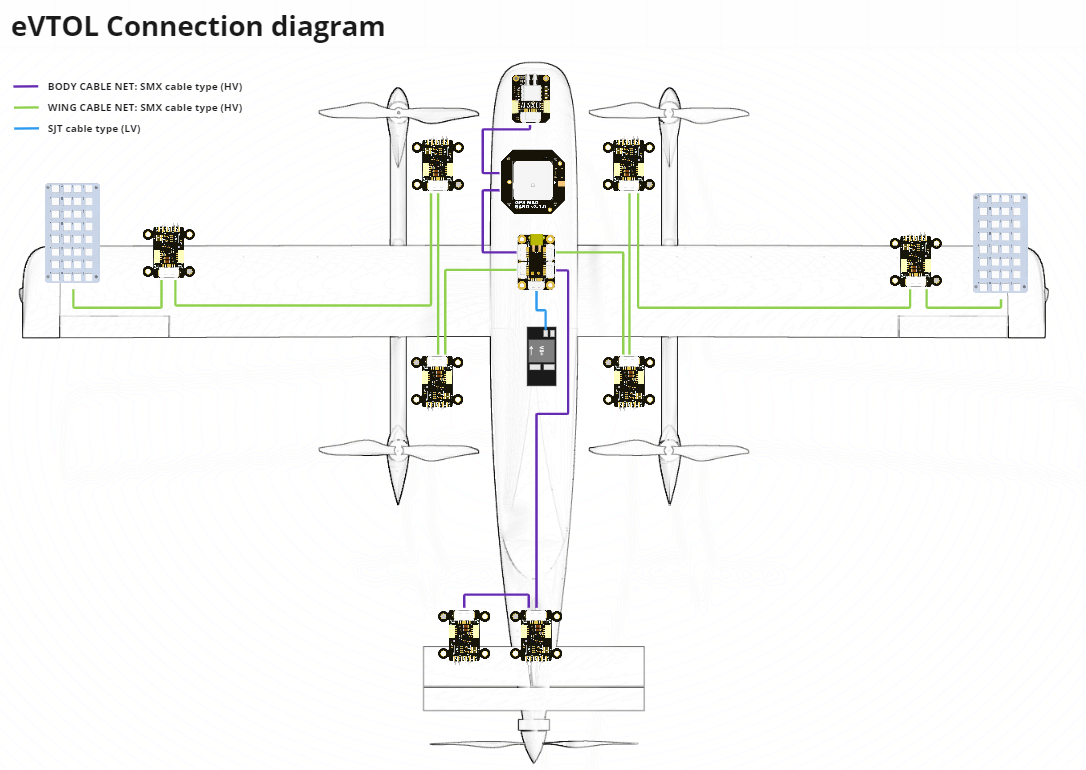
# 2. Connection diagram