# Introduction
Welcome to RaccoonLab documentation site. Here we collect comprehensive information and resources regarding our Cyphal (opens new window)/DroneCAN (opens new window) (old name UAVCAN) nodes.
The nodes are primarily based on CAN-bus and designed to be used in avionics especially with such autopilots as PX4 (opens new window), ArduPilot (opens new window). But they could also be used in other robotic applications.
We recommend you to get acquainted with our best devices that have already been launched into production.
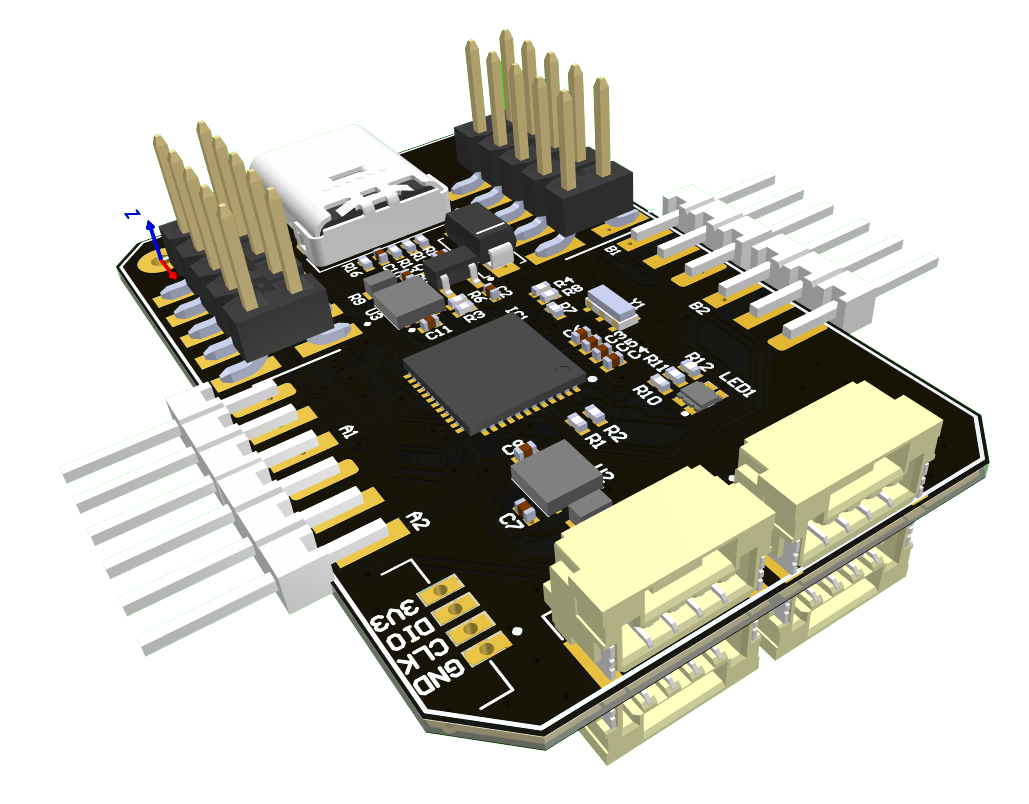
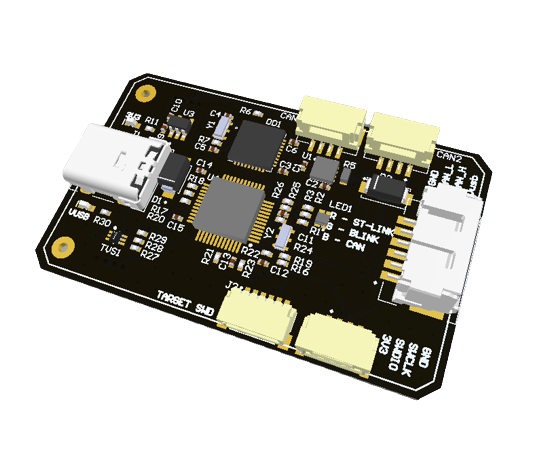 | Programmer sniffer is must-have device required for uploading firmware to the nodes, monitoring the CAN bus and performing the configuration. |
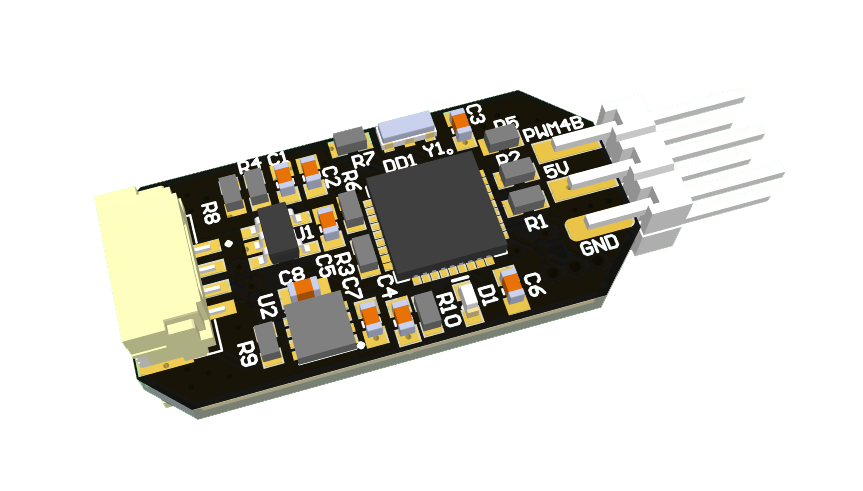 | PWM-micro is the smallest general-purpose CAN-adapter. It is designed to control 1 - 2 ESC or servo with an external power supply. |
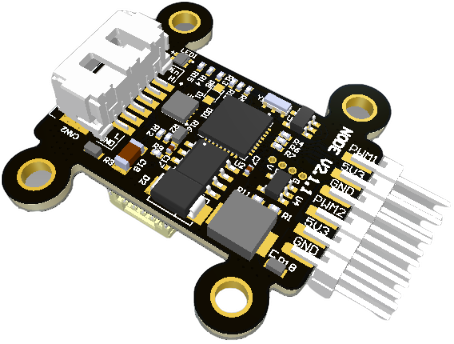 | PWM-mini is a general-purpose CAN-adapter designed to control 1-4 ESCs or servos. As the node has a built-in DC-DC, a servo can be powered through it. It allows to get feedback from a few popular ESC such as T-motor. |
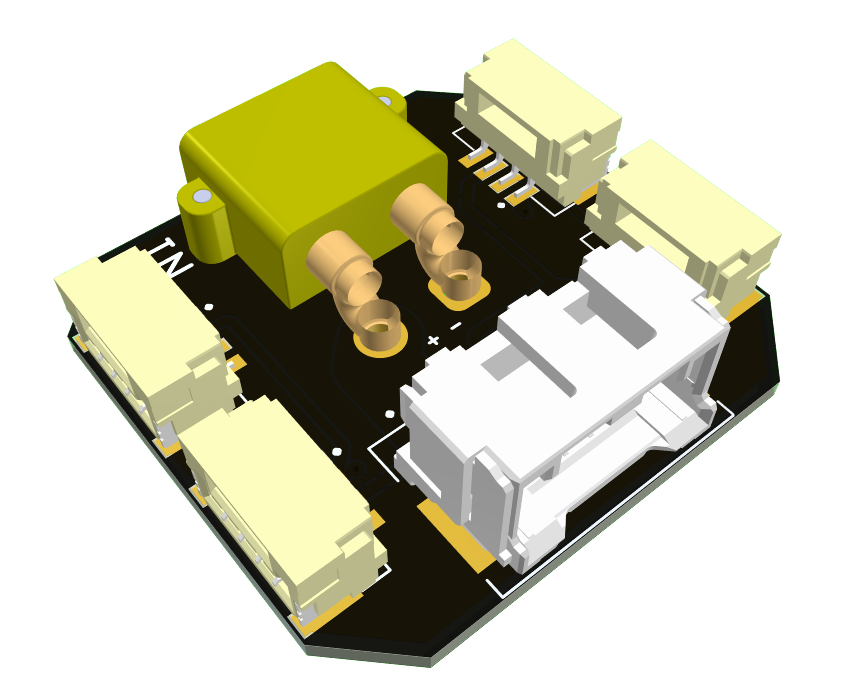
 | Airspeed is essential for fixed-wing UAVs. It measures differential pressure which can be used to estimate airspeed. |
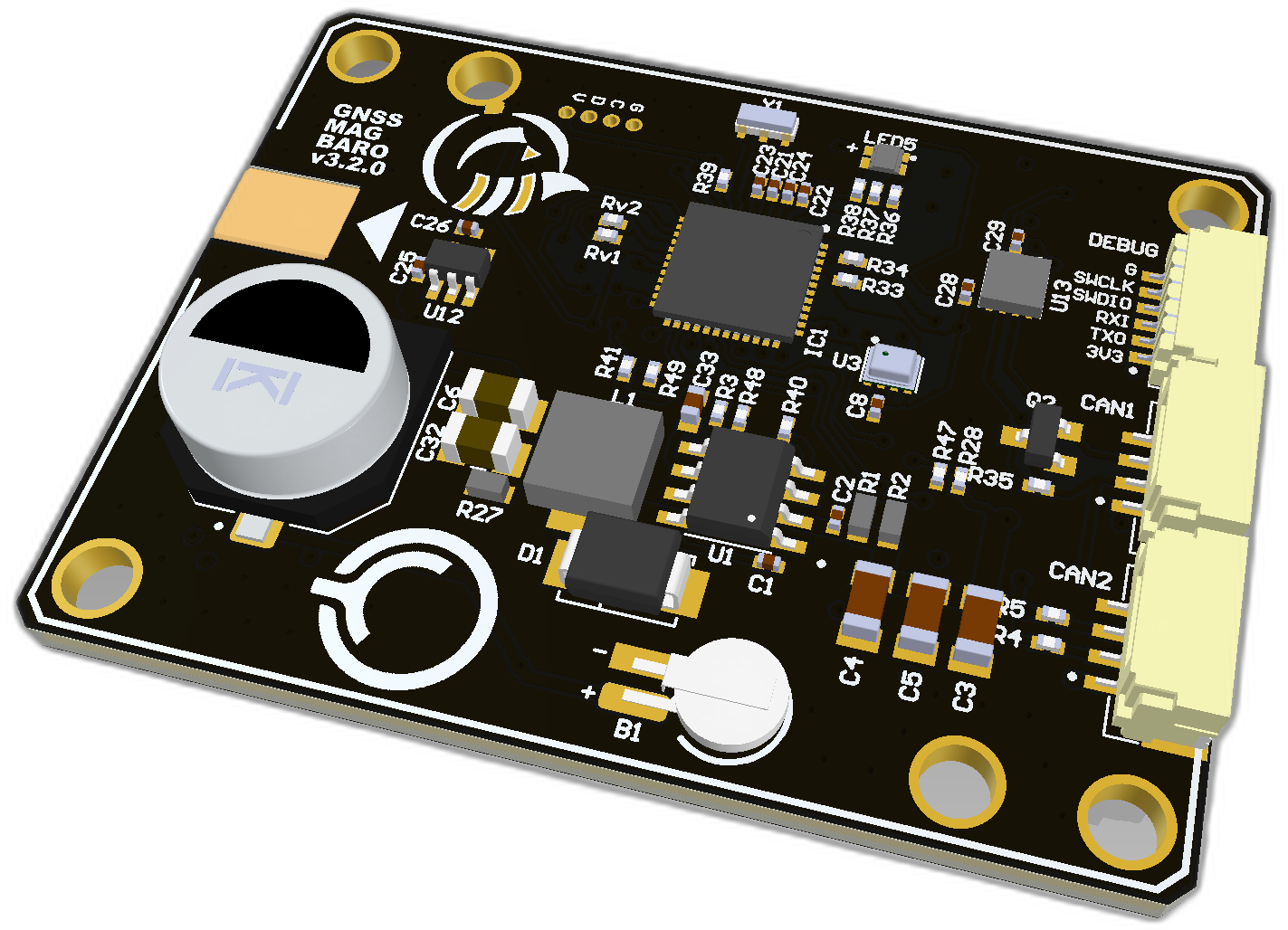 | GPS-MAG-BARO is the node that has 3 devices: GPS, magnetometer and barometer. |
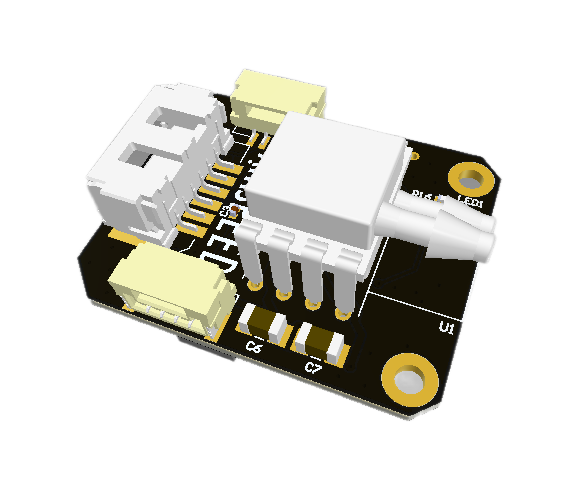
 | CAN-mux helps you easily connect your devices and organise your onboard network. |
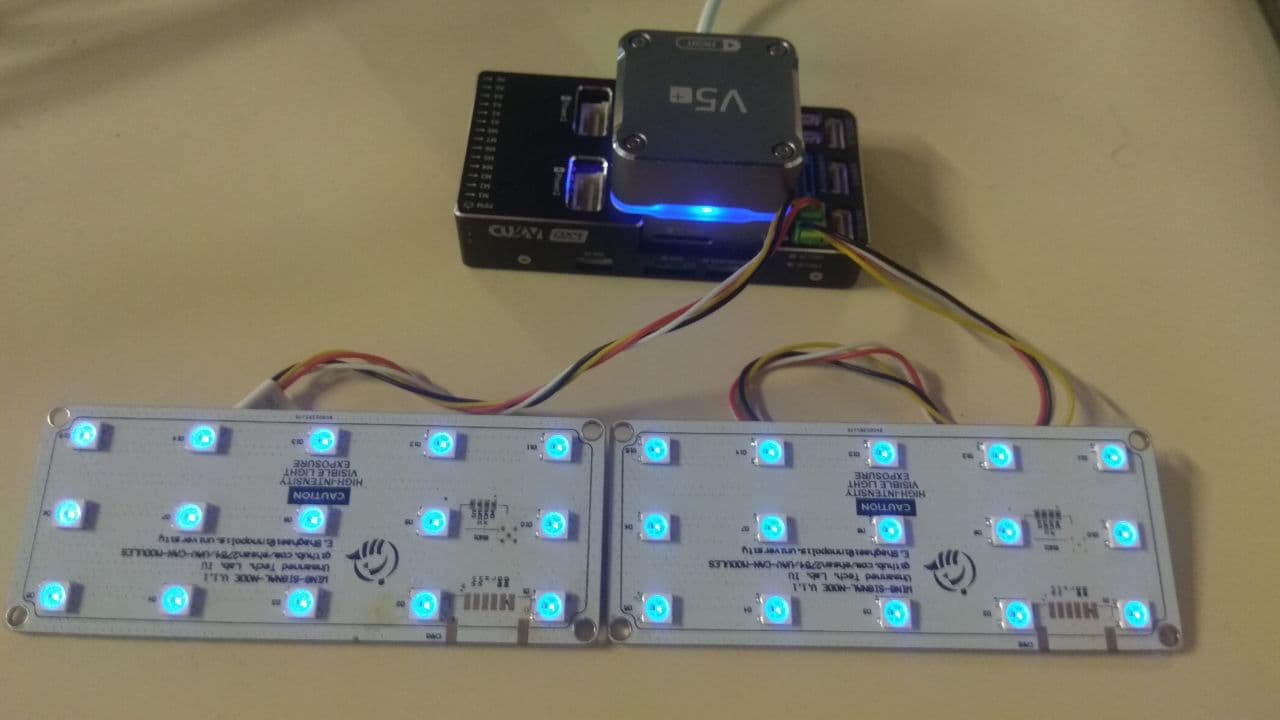 | Aviation lights adds lights to your UAV: use visible LEDs to indicate the current vehicle's status. |
We also have a few devices on the testing stage. If you have a suggestion, want a customization for you or another request, please either open an issue on github (opens new window) or email us directly.
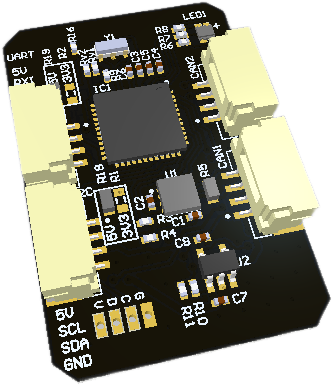 | Rangefinder is an adapter for i2c/uart rangefinders such as LW20/C, TF-Luna, Garmin lite v3, vl53l0x. It is usefull if you need a precision landing. |
 | Power connector |
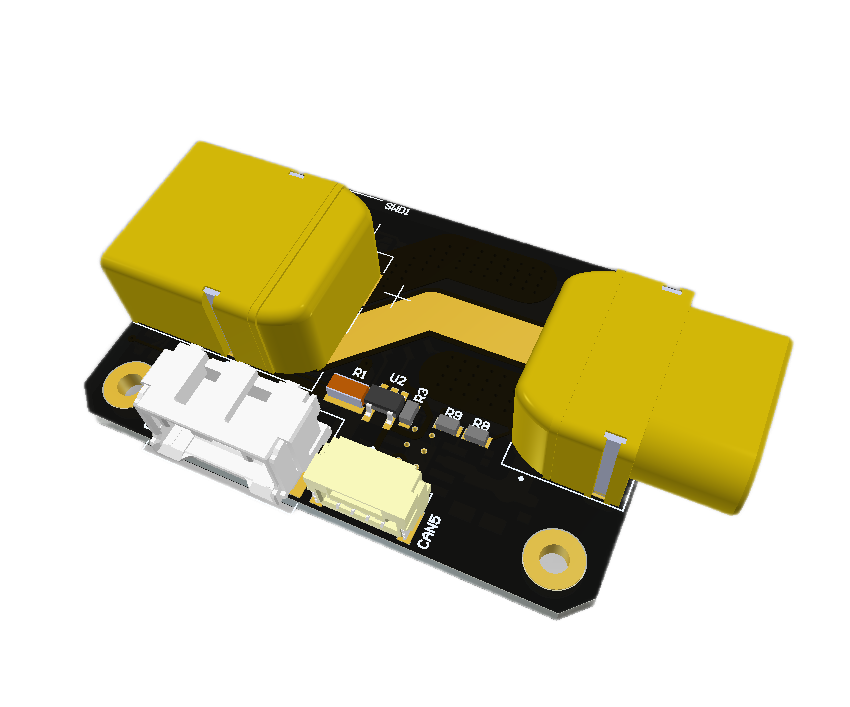
 | WiFi Sniffer allows wireless CAN-bus monitoring via WiFi/UDP. |
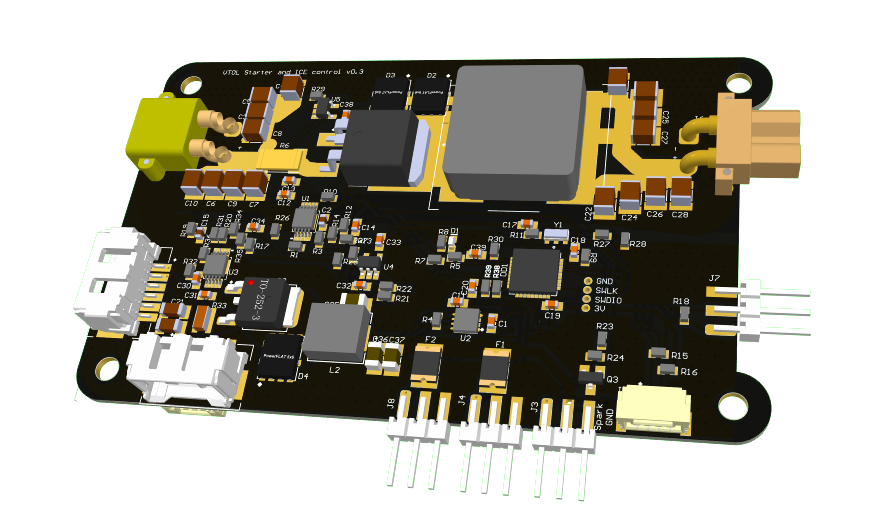 | Internal Combustion Engine controller is a sophisticated board for controlling the internal combustion engine and starter. |
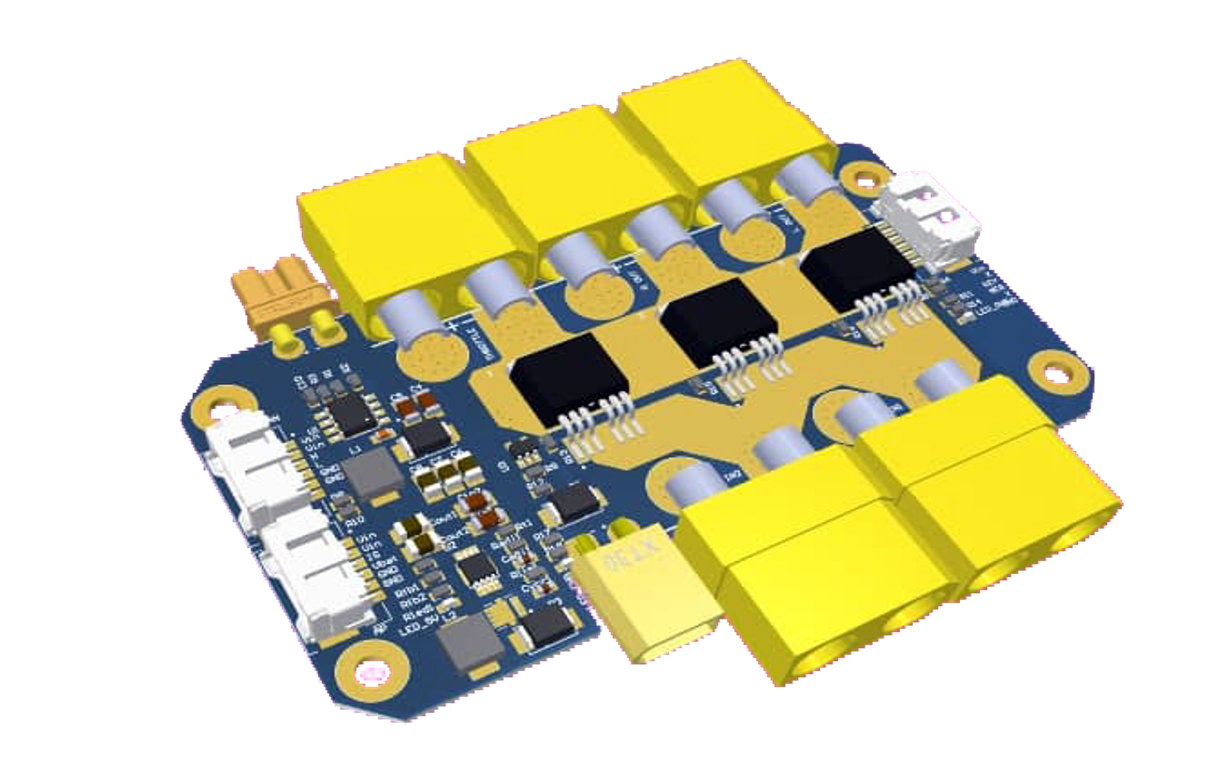 | PMU is a power management unit for complex vehicles. |
 | Charger allows you to charge a battery automatically. |
 | BMS is battery management system. |
 | RPI Hat is Raspberry PI SPI to CAN converter. |
 | FMUv4 based Autopilot. |
 | FMUv6x based Autopilot. |
| - | Inclinometer estimates its own orientation using IMU sensors. |
Auxilliary devices:
- CAN wires: 4 wire for UCANPHY Micro (JST-GH 4) and 6 wire for (Molex 502585-0670 (opens new window)).
# Reporting Bugs & Issues & Contributing
If you have a question, please either open an issue on github (opens new window) or email us directly.