# 5. Cyphal Interface
This page is about Cyphal related details such as interface, supported features, registers, configuration and usage examples and software versions. For general information, refer to the 1. General page., for hardware related details including connection example scheme please refer here.
# 5.1. Interface
This node interacts with the following data types:
Common for any node
| № | Type | Message |
|---|---|---|
| 1 | pub | uavcan.node.Heartbeat (opens new window) |
| 2 | RPC-service | uavcan.node.GetInfo.Response (opens new window) |
| 3 | RPC-service | uavcan.node.ExecuteCommand (opens new window) |
| 4 | RPC-service | uavcan.register.List (opens new window) |
| 5 | RPC-service | uavcan.register.Access (opens new window) |
| 6 | pub (since hardware v3) | uavcan.node.port.List (opens new window) |
Here ExecuteCommand supports COMMAND_RESTART=65535, COMMAND_FACTORY_RESET=65532 and COMMAND_STORE_PERSISTENT_STATES=65530.
Circuit status service
Like any other RaccoonLab node, this node also supports the Circuit status service. It uses the following subjects:
| № | Type | Message | Topic name |
|---|---|---|---|
| 1 | pub | uavcan.si.sample.voltage.Scalar.1.0 | 5v |
| 2 | pub | uavcan.si.sample.voltage.Scalar.1.0 | vin |
| 3 | pub | uavcan.si.sample.temperature.Scalar.1.0 | dev_temp |
Rangefinder service
It uses the following subjects:
| № | Type | Message | Topic name |
|---|---|---|---|
| 1 | publisher | uavcan.si.sample.length.Scalar.1.0 (opens new window) | range |
# 5.2. Cyphal Registers
Beside the standard uavcan.*.<subject>.id and uavcan.*.<subject>.type registers related to each subject, the node also have the following registers:
| № | Register name | Description |
|---|---|---|
| 1 | uavcan.node.id | Defines a node-ID. Allowed values [0,127]. |
| 2 | system.name | Defines custom node name. If empty, the node will use the default name. |
| 3 | uavcan.node.description | User/integrator-defined, human-readable description of this specific node. |
| 4 | system.internal | Reserved |
| 5 | system.protocol | Defines the protocol: 0 - Auto (always DroneCAN at the moment) 1 - Cyphal 2 - DroneCAN |
| 6 | range.type | Defines which sensor to use: 0 - LW20/C (i2c) 1 - TF-Luna (uart) 2 - Garmin lite v3 (i2c) 3 - vl53l0x (i2c) |
| 7 | range.dronecan_sensor_id | sensor_id in DroneCAN Measurement (opens new window) message |
Generated on Dec 03, 2023 for rangefinder_v1.6.0_e30e0394.
# 5.3. Getting started (bench test)
Before mounting on a real vehicle, especially when using the node for the first time, it is recommended to test the node and perform configuration on a bench using Yakut (opens new window) cli or Yukon (opens new window) gui.
This section provides a step-by-step checklist to test most features and configure essential parameters.
Step 1. Connect the Device
Upon connection, the node should blink with a blue color. For bench testing and configuration, refer to the connection scheme below:
An example of connection scheme just for bench testing and configuration is shown below.
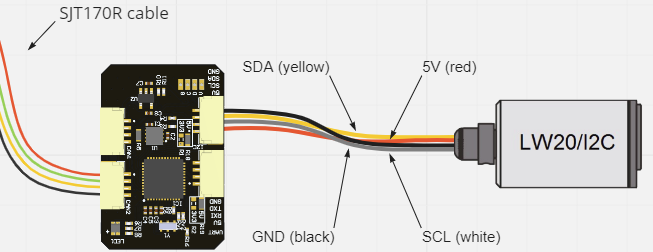

Note: Alternatively, in a vehicle you may want to connect the node via Molex CAN connector.
By the LED color you can determine the node state:
- Orange blinking means either something is not properly configured or something wrong.
- Red blinking means some critical error. It is related to a software or hardware issue.
- Normally, the node should blink with blue color.
Please, refer to the LED meaning page (opens new window) for details.
Step 2. Configure the Environment
For details about how to configure the environment, it is recommended to iether refer to the yukon (opens new window) and yakut (opens new window) instructions or to refer to our Cyphal usage instruction.
Step 3: Monitor the Node
Assuming you have correctly connected the Cyphal node to a CAN sniffer and prepared the environment, you can now monitor node's status.
Using Yakut CLI
Run the following command:
yakut monitor
You should see the output similar to the one shown below:

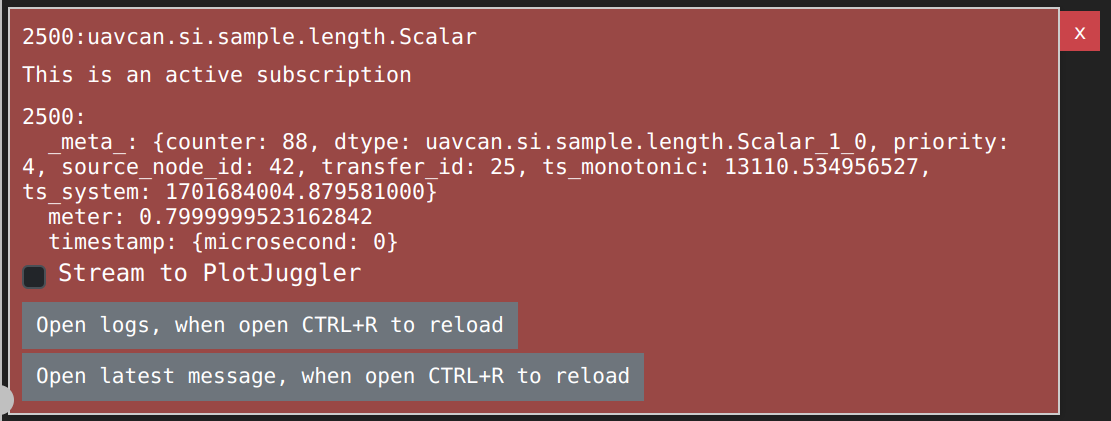
Using Yukon
Alternatively, you can use the Yukon GUI to monitor the node. Simply launch the Yukon GUI and navigate to the Monitor window.
An example of this window is presented below:

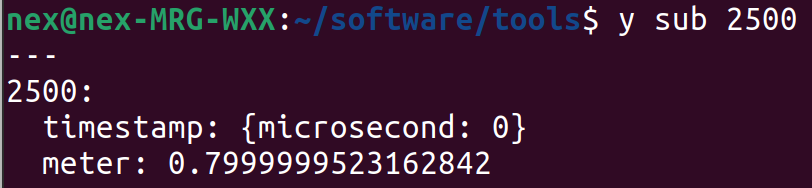
Step 4: Subscribe on range
y sub 2500
# 5.4. PX4 integration
in process...
# 5.5. Software versions
For latest (shipping) firmware please refer to Update the firmware page.
For all avaliable for Rangefinder Cyphal & DroneCAN releases please check 1. General page.
Click here to expand Legacy (Cyphal only) firmares
| Version | Description |
|---|---|
v1.0.8_46a2cf42 Nov 9, 2022 | First ever version of Cyphal rangefinder firmware. Support tf-luna only. |